地磁辅助导航(GMN)是一种利用地球磁场信息进行导航的技术。它通过匹配当前位置地磁场强度的测量与附近地区的地磁参考图获取实时导航信息,能够有效提高自主机器人和车辆的导航精度,具备成本低、覆盖范围广、无累计误差等优点;同时,GMN可修正其他导航系统(如惯性导航系统(INS))提供的位置和方向,因此,地磁辅助导航技术现已广泛应用于各个领域。
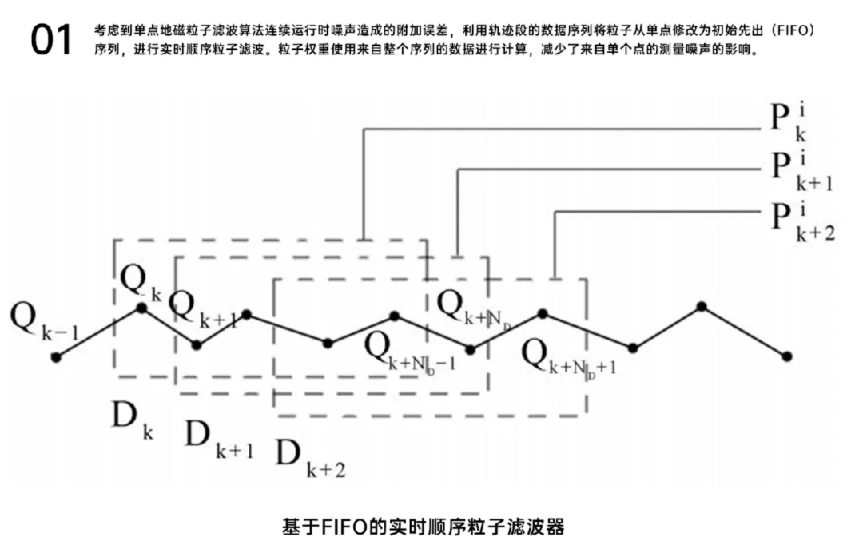
然而,由于磁强计测量地磁噪声的影响,基于单点粒子滤波器的地磁定位算法在连续运行过程中可能会出现显著的误差甚至发散,从而限制了其远程定位精度。
为了解决这一问题,哈尔滨工业大学信息科学与工程学院罗清华团队提出了一种基于实时顺序粒子滤波器的地磁定位方法。
哈工大罗清华团队方案设计
为了解决算法对噪声的灵敏度和累计误差导致的精度下降的问题,罗清华团队提出了一种基于实时序列粒子滤波器(RSPF)的地磁/测程综合定位方法。
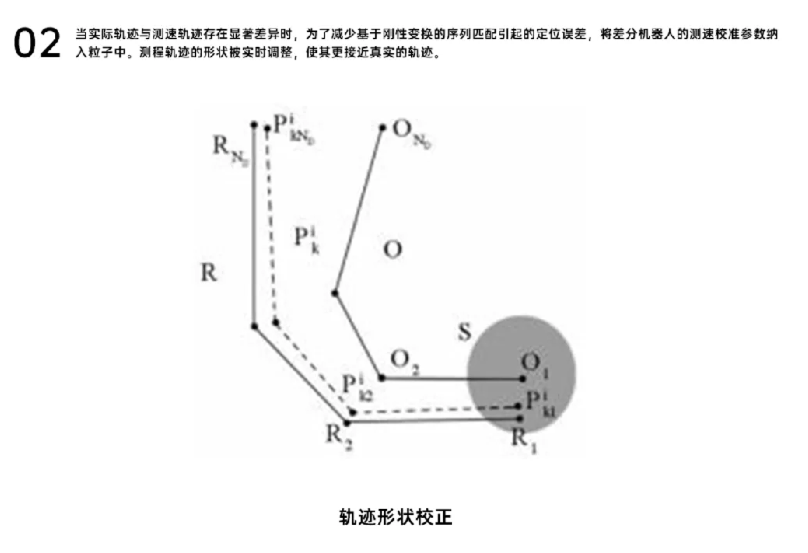
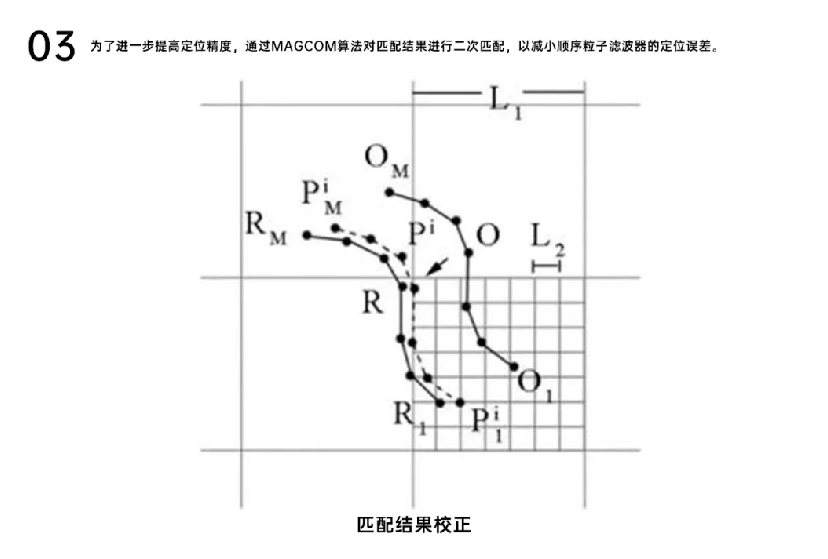
团队以差速机器人为实验对象,首先,通过实时连续粒子滤波,在保证实时性的同时,减轻了连续运行过程中噪声的影响;然后,通过测程校准参数对测程的轨迹形状进行校正,提高了该方法的远程定位精度;最后,通过MAGCOM算法对初步匹配结果进行二次匹配,进一步减小了该方法的定位误差:
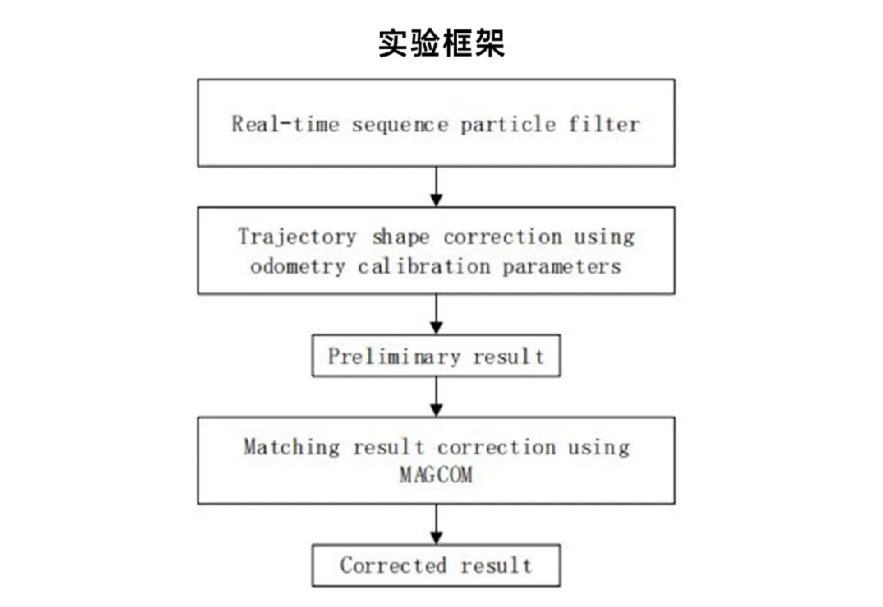
实验框架及实验思路
计算结果表明,利用RSPF有效地降低了磁强计测量噪声的影响。通过将测程校准参数纳入粒子中,可以实时调整轨迹形状,避免刚性变换造成的误差。最后,利用MAGCOM对初步匹配结果进行二次匹配,进一步提高了定位精度。
定位算法验证
为了进一步证明该算法的实用性,罗清华团队部署了一个真实差速机器人场地,将所提出的算法结果与通过元客视界FZMotion光学运动捕捉系统采集机器人的真实轨迹进行对比与评估。
实验中,由元客视界提供的FZMotion动捕系统在实验中作为系统真值groundtruth(定位精度可以达到亚毫米级,角度精度达到0.01°)。
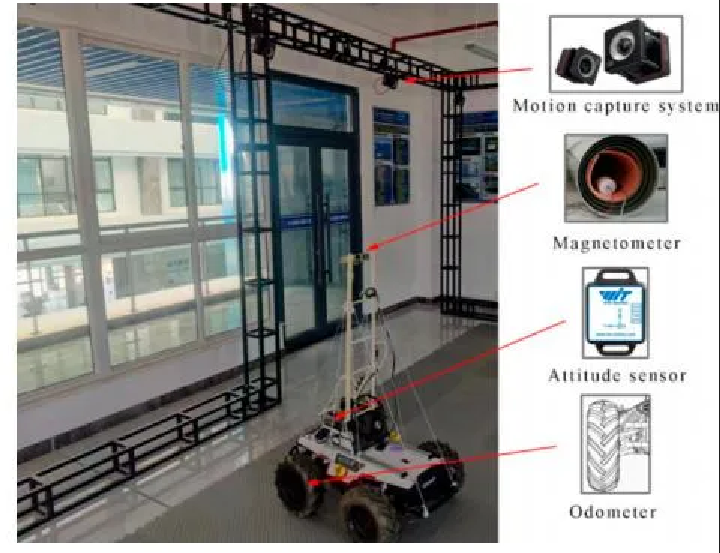
实验设备
在实验过程中,团队通过远程控制器控制机器人在实验区域内移动,共采集了10组真实轨迹进行匹配实验,并对相关算法的性能进行了比较分析。
实验结果的轨迹和定位误差(FZMotion数据作为真值)
实验结果表明,团队提出的算法比其他算法获得了更高水平的定位精度。该方法可以有效提高定位精度,为地磁辅助定位提供了重要参考,但仍需要进一步的研究来降低该方法的复杂性。
关于元客视界FZMotion
元客视界是凌云光设立的全资子公司,主要面向元宇宙虚拟现实、Web3.0时代数字人、沉浸媒体、全息通信、计算光学成像等应用,已形成光场建模、运动捕捉、全景成像、XR 拍摄等在内的产品布局。
FZMotion光学运动捕捉系统是元客视界自主开发的运动捕捉采集与分析系统,可以实时跟踪测量并记录三维空间内点的轨迹、刚体的运动姿态以及人体动作,空间定位精度可以达到亚毫米级。
FZMotion Swift系列相机

FZMotion动捕系统在无人机室内定位、仿生机器人运动规划、机械臂示教学习、气浮台位姿验证、水下运动捕捉等领域得到广泛应用,目前已经与清华大学、中国科学技术大学、北京航空航天大学、北京理工大学、哈尔滨工业大学等高校开展合作。凌云光·元客视界致力于为高校提供完备的解决方案,助力科研发展。
查看论文:
Luo Q, Yu M, Yan X, et al. A Geomagnetic/Odometry Integrated Localization Method for Differential Robot Using Real-Time Sequential Particle Filter[J]. Sensors, 2024, 24(7): 2120.
「免责声明」:以上页面展示信息由第三方发布,目的在于传播更多信息,与本网站立场无关。我们不保证该信息(包括但不限于文字、数据及图表)全部或者部分内容的准确性、真实性、完整性、有效性、及时性、原创性等。相关信息并未经过本网站证实,不对您构成任何投资建议,据此操作,风险自担,以上网页呈现的图片均为自发上传,如发生图片侵权行为与我们无关,如有请直接微信联系g1002718958。
